da Vinci Research Kit (dVRK)
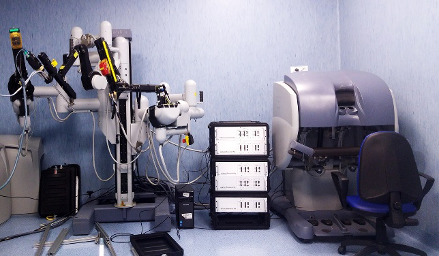
- Open research platform based on da Vinci System by Intuitive Surgical
- Surgeon's console with two Master Tool Manipulators (MTMs)
- MTM 8-degree-of-freedom robot
- Patient's end with two Patient Side Manipulators (PSMs)
- PSM 7-degree-of-freedom robot
- PSMs teleoperated by MTMs with coordinated foot-pedal movements